I. Introduction à la Dynamique
La dynamique est l’étude des liens entre les mouvements et les forces qui les provoquent. Elle permet de comprendre comment et pourquoi les objets se déplacent en fonction des forces appliquées.
II. Concepts de base
1. Vecteur quantité de mouvement
La
quantité de mouvement d’un point matériel de masse \( m \) et de vecteur vitesse \( \overrightarrow{v} \) est définie par :
\( \overrightarrow{p} = m \overrightarrow{v} \)
La quantité de mouvement est exprimée en \( \text{kg} \cdot \text{m/s} \).
2. Point matériel isolé et pseudo-isolé
Un point matériel est dit
isolé s’il n’est soumis à aucune force extérieure. Il est
pseudo-isolé si la somme des forces extérieures agissant sur lui est nulle.
3. Référentiel galiléen
Un
référentiel galiléen est un référentiel dans lequel tout point matériel isolé ou pseudo-isolé est en mouvement rectiligne uniforme ou au repos. Les lois de la dynamique s’appliquent dans ce type de référentiel.
III. La relation fondamentale de la dynamique
Dans un référentiel galiléen, la somme des forces extérieures appliquées à un objet est égale à la dérivée par rapport au temps de son vecteur quantité de mouvement. Elle s’écrit :
\( \sum \overrightarrow{F}_{\text{ext}} = \frac{d \overrightarrow{p}}{dt} \)
Pour un objet de masse constante, on a :
\( \sum \overrightarrow{F}_{\text{ext}} = m \overrightarrow{a} \)
où \( \overrightarrow{a} \) est le vecteur accélération de l’objet.
IV. Les lois de Newton
1. Première loi de Newton (Principe d’inertie)
Dans un référentiel galiléen, si un objet est isolé ou pseudo-isolé, alors il est soit au repos, soit en mouvement rectiligne uniforme. Cela signifie :
\( \sum \overrightarrow{F} = 0 \Rightarrow \overrightarrow{v} = \text{constante} \)
2. Deuxième loi de Newton (Principe fondamental de la dynamique)
Dans un référentiel galiléen, la somme des forces extérieures appliquées à un objet de masse \( m \) est égale au produit de sa masse par son accélération :
\( \sum \overrightarrow{F} = m \overrightarrow{a} \)
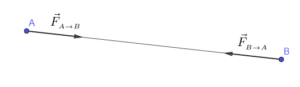
3. Troisième loi de Newton (Principe des actions réciproques)
Si un objet A exerce une force \( \overrightarrow{F}_{A \to B} \) sur un objet B, alors B exerce une force \( \overrightarrow{F}_{B \to A} = -\overrightarrow{F}_{A \to B} \) sur A. Les forces sont opposées mais de même intensité.
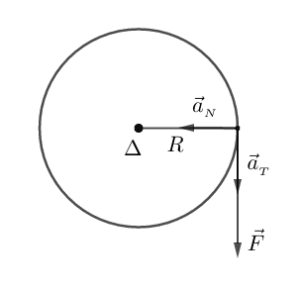
V. Théorème de l’accélération angulaire
Pour un objet en rotation, la somme des moments des forces par rapport à un axe est égale au produit du moment d’inertie \( J \) par l’accélération angulaire \( \alpha \) :
\( \sum M = J \alpha \)
Les moments d’inertie de différents objets sont donnés pour des formes géométriques spécifiques comme le disque, la sphère, et le cylindre.
VI. Méthodologie pour résoudre les problèmes de dynamique
- Définir le système à étudier.
- Choisir un référentiel galiléen.
- Faire le bilan des forces extérieures appliquées au système.
- Appliquer la relation fondamentale de la dynamique.
- Projeter les équations sur les axes choisis pour simplifier les calculs.
- Résoudre les équations en tenant compte des conditions initiales.
Exercice d’application
Un objet de masse \( m = 5 \, \text{kg} \) est soumis à une force constante \( \overrightarrow{F} = 10 \, \text{N} \) selon l’axe \( x \).
- Calculer l’accélération de l’objet.
- Déterminer la vitesse de l’objet après \( t = 4 \, \text{s} \) s’il part du repos.
Correction de l’exercice
1) Utilisant la deuxième loi de Newton :
\( \overrightarrow{a} = \frac{\overrightarrow{F}}{m} = \frac{10}{5} = 2 \, \text{m/s}^2 \)
2) Si l’objet part du repos, sa vitesse après \( t = 4 \, \text{s} \) est donnée par :
\( v = v_0 + a \cdot t = 0 + 2 \cdot 4 = 8 \, \text{m/s} \)
La vitesse de l’objet après 4 secondes est donc de \( 8 \, \text{m/s} \).




